Концепции современного естествознания: конспект лекций.
2. Квантовая механика.
Квантовая механика по-другому называется волновой механикой. Итак, квантовая механика – это теория, которая устанавливает способ описания и законы движения микрочастиц (элементарных частиц, атомов, молекул, атомных ядер) и их систем, а также связь величин, характеризующих частицы и их системы, с физическими величинами, непосредственно измеряемыми на опыте.
Квантовая механика помогла человечеству описать и осознать такие явления, как:
1) ферромагнетизм твердых тел;
2) сверхтекучесть твердых тел;
3) сверхпроводимость твердых тел;
4) была объяснена природа и происхождение нейтронных звезд, белых карликов и других астрофизических объектов.
На этом значение квантовой механики не заканчивается. В теории квантовая механика делится на два вида:
1) нерелятивистскую квантовую механику;
2) релятивистскую квантовую механику.
Различие релятивистской и нерелятивистской квантовой механики. Естественно, что если существует два направления квантовой механики, то значит, они должны противоречить друг другу. Через это противоречие можно просмотреть значение как нерелятивистской, так и релятивистской квантовой механики. Вот эти характеристики, различающие оба направления:
1) нерелятивистская квантовая механика более «строгая», это законченная фундаментальная физическая теория, главной особенностью которой является ее непротиворечивость. Релятивистская квантовая механика является более «мягкой», она допускает наличие противоречий в теории;
2) в нерелятивистской теории принято считать, что информация, помогающая взаимодействию, передается мгновенно. Релятивистская же квантовая механика утверждает, что взаимодействие распространяется со строго определенной скоростью (так называемой «конечной скоростью»). Следовательно, должно существовать что-то, что будет способствовать такой передаче. И этим «помощником» является физическое поле.
Одним из основоположников квантовой механики можно назвать Планка. Он первым выступил против существовавшей в то время теории теплового излучения. В основе теории теплового излучения лежала статистическая физика и классическая электродинамика. Эти две отрасли науки не дополняли друг друга, а наоборот, приводили к противоречию всю теорию теплового излучения.
В чем же заключается точка зрения Планка? А суть его точки зрения заключается в том, что свет излучается не непрерывно (как считалось ранее), а порциями. А точнее – дискретными порциями энергии, т. е. квантами.
В квантовой механике выделяют так называемые дискретные состояния. Смысл данного состояния в том, что тело большого масштаба непрерывно изменяет свою скорость. Причем изменение этой скорости может происходить как в сторону ее увеличения, так и в сторону ее уменьшения. Для изменения скорости имеют большое значение разнообразные физические явления. Именно эти явления способствуют увеличению скорости или же, наоборот, ее уменьшению. Примером физического явления, которое способствует уменьшению скорости тела, можно назвать сопротивление воздуха. Чтобы понять это, достаточно вспомнить маятник часов: сначала маятник колеблется довольно «часто», а затем останавливается вообще.
Понятно, что не только Планк сыграл выдающуюся роль в развитии квантовой механики. Этапы развития квантовой механики (это развитие можно проследить в хронологическом порядке) выглядят так:
1) в 1905 г. Альберт Эйнштейн построил теорию фотоэффекта. Данная теория была построена с целью развития идей Планка. Эйнштейн предположил, что свет не только испускается и поглощается, но и распространяется квантами. Следовательно, дискретность присуща самому свету;
2) в 1913 г. Бор применяет идею квантов по отношению к планетарной системе атомов. Данная идея Бора привела к научному парадоксу. Согласно Бору, радиус орбиты электрона постоянно уменьшался. Электрон в конце концов должен был просто «упасть» на ядро. Бор решил, что электрон испускает свет не постоянно, а лишь тогда, когда он переходит на другую орбиту;
3) в 1922 г. американец Комптон доказал, что рассеяние света происходит путем столкновения двух частиц;
4) эффект Комптона привел также к парадоксу. Он утверждал о корпускулярно-волновой природе света. И это было явное противоречие: эти два явления не могли смешиваться. В 1924 г. французский ученый Луи де Бройль выдвинул теорию, согласно которой каждой частице надо поставить волну, которая связана с импульсом частицы;
5) австриец Шредингер доказал гипотезу де Бройля. Шредингер придумал уравнение, которое соответствует поведению волн де Бройля. Данное уравнение получило название «уравнение Шредингера»;
6) в 1926 г. ученые-физики проводили опыты, которые экспериментально окончательно подтвердили теорию де Бройля;
7) в 1927 г. Дирак придумывает свое уравнение, которое становится главным аргументом релятивистской квантовой механики. Это уравнение описывает движение электрона во внешнем силовом поле.
Окончательно квантовая механика как последовательная теория сформировалась благодаря трудам немецкого ученого – физика В. Гейзенберга, создавшего формальную схему. Особенностью данной схемы было то, что вместо математических координат и математических скоростей фигурировали абстрактные величины, так называемые матрицы.
Работы Гейзенберга были развиты другими учеными (например, Борном, Иорданом и др.). Работа немецкого физика Гейзенберга стала основой для матричной механики.
Также Гейзенберг является автором гипотезы о том, что любая физическая система никогда не может находиться в состоянии, в котором координаты ее центра инерции и импульса принимают одновременно равные значения.
Этот принцип известен в науке как «соотношение неопределенностей».
Согласно этому принципу, понятие координат и импульса неприменимо к микроскопическим объектам. Это объясняется тем, что эксперимент никогда не приводит к каким-либо точным данным. Это связано не с тем, что измерительная техника несовершенна, а с объективными свойствами микромира.
2.5. Положения и принципы квантовой механики
1. Положения, соответствующие квантовой механике:
– при рассмотрении природы микрочастиц используют понятие о корпускулярно-волновом дуализме, что означает проявление как волновых, так и корпускулярных свойств;
– квантовая механика является статистической теорией, т. е. законы квантовой механики носят статистический характер;
– в квантовомеханических закономерностях некоторые физические величины квантованы, то есть могут принимать только вполне определенные дискретные значения;
– в квантовомеханических закономерностях существенна дискретность величин с размерностью действия;
– невозможно одновременно точно определить два дополнительных параметра объекта.
2. Согласно гипотезе М. Планка свет испускается квантами, т. е. порциями. Энергия кванта
E = h,
где h – постоянная Планка, – частота кванта (формула Планка).
3. Корпускулярно-волновой дуализм связывает импульс частицы p с длиной его волны формулой Луи де Бройля:
4. Квантовые свойства света были открыты Эйнштейном в начале XX века. В 1922 г. он получил Нобелевскую премию за объяснение фотоэффекта – испускания веществом электронов под действием электромагнитного излучения.
5. К законам, описывающим поведение как корпускулярной, так и волновой формы материи, в частности, упругое соударение двух шаров, относятся:
– закон сохранения энергии;
– закон сохранения импульса.
6. Согласно современным представлениям вещество и поле в микромире могут, в принципе, превращаться друг в друга.
7. Принцип (соотношение) неопределённостей (для микрочастиц):
x px h,
где x – неопределенность координаты, px – неопределенность проекции импульса на ось x, h – постоянная Планка. Этот принцип означает следующее:
– невозможность точного одновременного измерения координаты и импульса, энергии и времени или двух других дополнительных величин;
– очень точное определение координаты частицы приводит к менее точному измерению ее импульса;
– чем определеннее величина энергии частицы, тем больше времени требуется на измерение;
– если ограничено время измерения, то будет высокой погрешность определения энергии.
8. Из соотношения неопределенностей следует, что наблюдать микромир, не нарушая его, невозможно. Измерение в квантовой механике есть результат взаимодействия микрообъекта с макроприбором. Кроме того, это означает, что энергии возбуждённых уровней не могут быть строго определёнными, а их ширина связана с временем жизни этого состояния (квантовые флуктуации).
9. Принцип дополнительности:
– в широком смысле принцип дополнительности означает, что полное представление о свойствах объекта требует взгляда на него с разных несовместимых, но взаимодополняющих точек зрения;
– для полного описания объекта требуется набор дополняющих друг друга характеристик (волновое и корпускулярное описание микропроцессов не исключают и не заменяют друг друга, а взаимно дополняют);
– получение экспериментальной информации об одних физических параметрах неизбежно приводит к потере других дополнительных параметров, которые характеризуют это явление с несколько другой стороны;
– однозначно, одним методов невозможно описать явление, объект или субъект, необходимо привлечь дополнительные представления;
– сформулирован для описания микромира и используется только в микромире.
10. Физическим вакуумом называется основное состояние квантового поля с минимальной энергией, в котором отсутствуют реальные частицы, но присутствуют виртуальные частицы, осуществляющие взаимодействия между структурами мира.
11. Виртуальные частицы (или кванты полей) не могут быть обнаружены без внешнего воздействия, но при наличии внешнего воздействия они становятся реальными. Экспериментальными доказательствами сложной структуры вакуума являются эффект Казимира и рождение электрон-позитронных пар в электрическом поле. Эффектом Казимира называется взаимное притяжение проводящих незаряженных пластин за счёт квантовых флуктуаций электромагнитного поля. В физическом вакууме возникают энергетические колебания из-за постоянного рождения и исчезновения в нём виртуальных частиц.
12. Из принципа неопределённости следует, что некоторые физические величины не имеют определённого значения в данном состоянии. Невозможность одновременного равенства нулю как числа фотонов, так и напряжённостей электрического и магнитного полей даёт основание считать вакуумное состояние не просто отсутствием поля, а одном из возможных состояний поля с определёнными свойствами.
13. Состояние системы в квантовой механике определяется волновой (пси)-функцией, квадрат модуля которой означает вероятность нахождения частицы в данной точке пространства. Волновая функция объекта находится решением волнового уравнения, называемого уравнением Шредингера.
14. Тождественность частиц – фундаментальный принцип квантовой механики, согласно которому состояния системы, получающиеся перестановкой тождественных частиц местами, неразличимы и должны рассматриваться как одно физическое состояние. Тождественными считаются частицы, обладающие одинаковыми характеристиками, например, все электроны Вселенной.
15. Принцип тождественности означает, что вероятность реализации системы не должна изменяться, если тождественные частицы поменять местами. Волновая функция системы из двух одинаковых частиц будет зависеть от координат и спинов каждой частицы, которые мы условно обозначим числами 1 и 2. Здесь 1 означает совокупность всех координат и спин первой частицы, а 2 – второй. Квадрат модуля волновой функции означает вероятность нахождения частицы в данном месте, причем тождественность частиц требует, чтобы эта вероятность не изменялась, если частицы поменять местами, т. е.:
(1, 2) 2 = (2, 1) 2 .
Из этой формулы вытекают две возможности:
Полученный результат означает, что в природе существуют два класса волновых функций – симметричные и антисимметричные. Частицы, описываемые симметричными волновыми функциями, называются бозонами, они обладают целым спином и могут находиться в одном и том же квантовом состоянии. Примеры: фотоны, пи-мезоны. Частицы с антисимметричными волновыми функциями называются фермионами, у них полуцелый спин, и они не могут одновременно находиться в одном квантовом состоянии (принцип Паули). Примеры: электрон, протон, нейтрон.
16. Атом состоит из протонно-нейтронного ядра, окружённого электронными оболочками. Положение электрона в атоме нельзя точно определить, ибо электрон – волна, «размазанная» по всему атому.
17. Ядра атомов имеют размеры 10 -13 –10 -12 см и положительный заряд, кратный абсолютной величине заряда электрона или протона. Число протонов ядра (заряд ядра) совпадает с порядковым номером элемента в периодической системе Менделеева.
18. Изотопами называются ядра с одинаковыми зарядами, но разным числом нейтронов. Например, хлор-35 и хлор-37.
19. Общее число нуклонов (протонов и нейтронов) в ядра называется массовым числом.
20. Изотонами называются ядра с разными зарядами, но одинаковым числом нейтронов. Например, углерод-13 и азот-14.
21. Изобарами называются ядра с одинаковыми массовыми числами, но с разным числом протонов и нейтронов, т. е. разные химические элементы. Например, аргон-40 и кальций-40.
22. Энергией связи ядра называется энергия, которую необходимо затратить для расщепления ядра на отдельные нуклоны. Масса ядра меньше, чем суммарная масса составляющих его нуклонов, эта разница называется дефектом массы. Энергия связи ядра равна дефекту массы, умноженной на квадрат скорости света, согласно закону взаимосвязи между массой и энергией (теория относительности).
23. Реакции распада некоторых ядер идут с выделением энергии. К ним относится реакция цепного деления урана, применяемая в атомных электростанциях или атомных бомбах.
24. Реакции синтеза лёгких атомных ядер также протекают с выделением энергии в ещё больших размерах. Такие реакции идут в водородных бомбах или в звёздах.
25. Элементарными называются мельчайшие наблюдаемые частицы, не являющиеся атомами или атомными ядрами. Исключение составляет протон – ядро атома водорода.
26. К основным характеристикам элементарных частиц относятся масса, заряд, спин, время жизни и квантовые числа.
27. Каждой элементарной частице соответствует античастица, кроме фотона. Частица-электрон отличается от своей античастицы – позитрона знаком электрического заряда.
28. Фундаментальные взаимодействия по величине относительной интенсивности (от большей к меньшей) располагаются в следующем порядке:
– сильное или ядерное (притяжение нуклонов в ядрах, короткодействующее);
– электромагнитное (притяжение или отталкивание электрических зарядов, дальнодействующее),
– слабое (взаимодействие лептонов, короткодействующее),
– гравитационное (притяжение тел, имеющих массу, дальнодействующее).
29. На расстояниях макромира (например, свыше 1 мм) частицы могут испытывать только электромагнитные или гравитационные взаимодействия.
30. Переносчиками сильного взаимодействия являются глюоны, электромагнитного – виртуальные фотоны, слабого – промежуточные векторные бозоны, гравитационного – гравитоны (гипотетические, экспериментально не обнаруженные частицы).
31. В ядрах атомов доминирует сильное взаимодействие между нуклонами (протонами и нейтронами), которое превосходит электромагнитное отталкивание положительно заряженных протонов.
32. В ядерных реакциях (термоядерных или превращениях в ядерных реакторах) определяющими взаимодействиями оказываются сильное и слабое.
33. Существование атома обусловлено электромагнитным взаимодействием: притяжением положительно заряженного ядра и отрицательно заряженного электронного облака.
34. Атомы соединяются в молекулы и удерживаются в них посредством электромагнитного взаимодействия.
35. Давление света обусловлено электромагнитным взаимодействием.
36. В космосе, например, в галактике или Солнечной системе доминирует гравитационное взаимодействие, распространяющееся со скоростью 300 000 км/с.
37. Классификация элементарных частиц:
– по времени жизни: стабильные (протон, электрон, нейтрино и их античастицы) и нестабильные (свободный нейтрон, резонансы и др.);
– по их массе (устаревшая): безмассовые (фотон), лёгкие (лептоны), средние (мезоны), тяжёлые (барионы).
– основной является классификация частиц по их участию в фундаментальных взаимодействиях, согласно которой адронами называются частицы, участвующие во всех четырех взаимодействиях, а лептонами – частицы, не участвующие в сильном взаимодействии. Здесь имеется некоторое расхождение с ранее сложившейся терминологией, поскольку лептонами оказались не только легкие частицы. Адроны могут быть как бозонами (барионы), так и фермионами (мезоны). Лептоны (кроме фотона) являются фермионами. Примеры адронов: протон, нейтрон, пион, гипероны. Примеры лептонов: электрон, позитрон, мюон, нейтрино.
38. Изучение свойств адронов позволило обнаружить у них особую симметрию. Концепция симметрии как фактора, определяющего существование различных семейств и групп, привела к заключению о наличии у адронов общих структурных элементов, которые получили название кварков.
39. Кварки – это особые структурные единицы, из которых состоят адроны. Мезоны образуются из пары кварк – антикварк, барионы – из трёх кварков. В свободном состоянии кварки не существуют. Кваркам приписывается дробный электрический заряд, спин ½ (кварки – фермионы) и другие квантовые числа. Кварки бывают шести типов. Каждый из них может находиться в одном из трёх «окрашенных» состояний (условная терминология): жёлтый, синий, красный. Антикваркам приписываются противоположные цвета: фиолетовый, оранжевый и зелёный. Именно кварки содержат переносчики сильного взаимодействия – глюоны.
40. Фундаментальных частиц, представляющих собой основу мироздания всего 17. К ним относятся 12 фермионов (шесть кварков и шесть лептонов: электрон, таон, мюон, электронное нейтрино, таонное нейтрино и мюонное нейтрино) и 5 переносчиков фундаментальных взаимодействий: фотон, глюон, два промежуточных векторных бозона и гравитон (табл. 2.3).
Условия равновесия тел
Равновесие тела
Тело находится в состоянии покоя (или движется равномерно и прямолинейно), если векторная сумма всех сил, действующих на него, равна нулю. Говорят, что силы уравновешивают друг друга. Когда мы имеем дело с телом определенной геометрической формы, при вычислении равнодействующей силы можно все силы прикладывать к центру масс тела.
Условие равновесия тел
Чтобы тело, которое не вращается, находилось в равновесии, необходимо, чтобы равнодействующая всех сил, действующий на него, была равна нулю.
F → = F 1 → + F 2 → + . . + F n → = 0 .
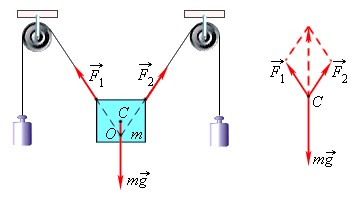
На рисунке выше изображено равновесие твердого тела. Брусок находится в состоянии равновесия под действием трех действующих не него сил. Линии действия сил F 1 → и F 2 → пересекаются в точке O . Точка приложения силы тяжести - центр масс тела C . Данные точки лежат на одной прямой, и при вычислении равнодействующей силы F 1 → , F 2 → и m g → приводятся к точке C .
Равновесие вращающегося тела. Правило моментов
Условия равенства нулю равнодействующей всех сил недостаточно, если тело может вращаться вокруг некоторой оси.
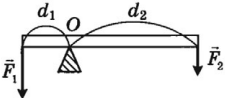
Плечом силы d называется длина перпендикуляра, проведенного от линии действия силы к точке ее приложения. Момент силы M - произведение плеча силы на ее модуль.
Момент силы стремится повернуть тело вокруг оси. Те моменты, которые поворачивают тело против часовой стрелки, считаются положительными. Единица измерения момента силы в международной системе CИ - 1 Н ь ю т о н м е т р .
Определение. Правило моментов
Если алгебраическая сумма всех моментов, приложенных к телу относительно неподвижной оси вращения, равна нулю, то тело находится в состоянии равновесия.
M 1 + M 2 + . . + M n = 0

В общем случае для равновесия тел необходимо выполнение двух условий: равенство нулю равнодействующей силы и соблюдение правила моментов.
Безразличное, устойчивое и неустойчивое равновесие
В механике есть разные виды равновесия. Так, различают устойчивое и неустойчивое, а также безразличное равновесие.
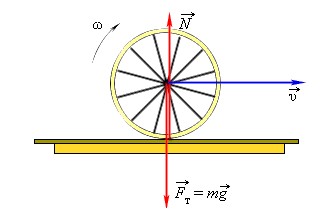
Типичный пример безразличного равновесия - катящееся колесо (или шар), которое, если остановить его в любой точке, окажется в состоянии равновесия.
Устойчивое равновесие - такое равновесие тела, когда при его малых отклонениях возникают силы или моменты сил, которые стремятся вернуть тело в равновесное состояние.
Неустойчивое равновесие - состояние равновесия, при малом отклонении от которого силы и моменты сил стремятся вывести тело из равновесия еще больше.
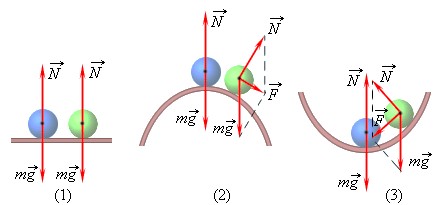
На рисунке выше положение шара (1) - безразличное равновесие, (2) - неустойчивое равновесие, (3) - устойчивое равновесие.
Тело с неподвижной осью вращения может находится в любом из описанных положений равновесия. Если ось вращения проходит через центр масс, возникает безразличное равновесие. При устойчивом и неустойчивом равновесии центр масс располагается на вертикальной прямой, которая проходит через ось вращения. Когда центр масс находится ниже оси вращения, равновесие является устойчивым. Иначе - наоборот.
Особый случай равновесия - равновесие тела на опоре. При этом упругая сила распределяется по всему основанию тела, а не проходит через одну точку. Тело покоится в равновесии, когда вертикальная линия, проведенная через центр масс, пересекает площадь опоры. Иначе, если линия из центра масс не попадает в контур, образованный линиями, соединяющими точки опоры, тело опрокидывается.
Пример равновесия тела на опоре - знаменитая Пизанская башня. По легенде с нее сбрасывал шары Галилео Галилей, когда проводил свои опыты по изучению свободного падения тел.
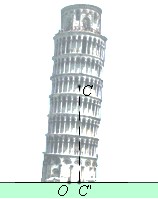
Линия, проведенная из центра масс башни пересекает основание приблизительно в 2,3 м от его центра.
Условия равновесия тел в физике - формулы и определение с примерами
Содержание:
- Условия равновесия тел
- Виды равновесия
- Устойчивое равновесие
- Неустойчивое равновесие
- Безразличное равновесие
- Образец решения задачи
- Виды равновесия
- Определение условия равновесия тела
- Равновесие тела при поступательном движении
- Равновесие тела с неподвижной осью вращения
Условия равновесия тел:
Основным признаком взаимодействия тел в динамике является возникновение ускорений. Однако часто бывает нужно знать, при каких условиях тело, на которое действует несколько сил, не движется с ускорением, а покоится или движется равномерно и прямолинейно. В последнем случае мы всегда можем выбрать другую инерциальную систему отсчета, в которой тело покоится, поэтому в дальнейшем будем изучать условия равновесия покоящихся тел.
Раздел механики, в котором изучаются условия равновесия тел, называется статикой.
Все опытные факты, которые мы рассмотрели в предыдущих параграфах, убеждают нас в том, что тело покоится, если равнодействующая всех сил, действующих на него, равна нулю.
Итак, первое условие равновесия тела: векторная сумма всех сил, приложенных к телу, равна нулю.
Если на тело действует n сил 
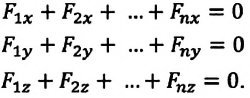
Из этого условия следует, что и сумма проекций всех сил на любое направление тоже должна быть равна нулю. В частности, сумма проекций сил на оси выбранной декартовой системы координат равна нулю:

Фактически эти три равенства эквивалентны одному векторному равенству ( 1 ). Но с их помощью достаточно просто решать задачи, поскольку проекции сил — скалярные величины.
В повседневной жизни и технике часто встречаются тела, которые не могут двигаться поступательно, но могут вращаться вокруг оси. Примерами таких тел могут служить двери и окна, качели, колеса машин и детали механизмов и т. д.
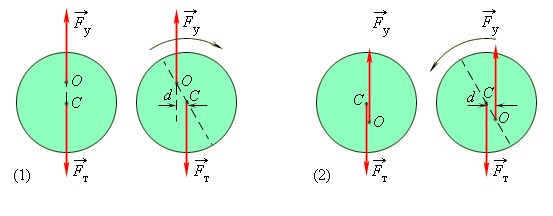
На рисунке 149, а изображен однородный диск, который может вращаться вокруг закрепленной оси, проходящей через его центр — точку О. Если подвесить к нему тело в точке А, то диск будет находиться в равновесии.
Естественно, что действующая сила  будет уравновешиваться силой упругости
будет уравновешиваться силой упругости  со стороны оси вращения. Если подвесить тело в точке В, то равновесие тоже не нарушится. Отсюда можно сделать вывод, что точку приложения силы натяжения можно переносить вдоль линии действия силы. При этом силы и лежат на одной прямой.
со стороны оси вращения. Если подвесить тело в точке В, то равновесие тоже не нарушится. Отсюда можно сделать вывод, что точку приложения силы натяжения можно переносить вдоль линии действия силы. При этом силы и лежат на одной прямой.
Если же прямая, на которой лежит вектор силы , не проходит через ось вращения, то эта сила не может быть уравновешена силой упругости оси, и тело поворачивается вокруг нее (рис. 149, б).
На рисунке 149, в изображен тот же диск, на который действуют две силы  и
и  . Численные значения этих сил определяются динамометрами. Сила вращает диск против часовой стрелки, а сила — по часовой стрелке. Диск не будет вращаться, если выполняется условие:
. Численные значения этих сил определяются динамометрами. Сила вращает диск против часовой стрелки, а сила — по часовой стрелке. Диск не будет вращаться, если выполняется условие:
 (2)
(2)
где l1 и l2 — кратчайшие расстояния от оси вращения до прямых, на которых лежат векторы сил и .
Итак, мы получили известное вам из курса физики 8-го класса условие равновесия рычага.
Кратчайшее расстояние от оси вращения до линии действия силы называется плечом силы, а произведение модуля силы F на плечо l называется моментом силы М:
M = Fl (3)
Из определения момента силы следует, что единицей его измерения в СИ является 1 ньютон-метр (1 H . м).
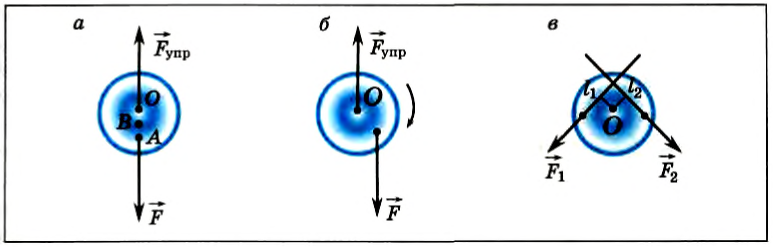
Рис. 149
Следовательно, равенство (2) означает равенство моментов сил F1 и F2. Но момент силы F1 вращает диск против часовой стрелки, а момент силы F2 — по часовой стрелке. Поэтому им нужно приписать различные знаки. Обычно положительным считают момент силы, вызывающий вращение по часовой стрелке, а отрицательным — момент силы, вызывающий вращение против часовой стрелки.
Если же на тело, закрепленное на оси, действуют n сил, то оно будет в равновесии, если алгебраическая сумма моментов сил будет равна нулю:
M1+ M2 + . +Mn = 0. (4)
Итак, вторым условием равновесия тела является правило моментов: тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех сил, приложенных к телу, относительно этой оси равна нулю.
Таким образом, тело будет находиться в равновесии, если выполняются два условия: (1) и (4). Например, доска, изображенная на рисунке 150, находится в равновесии.

Рис. 150
Главные выводы:
- Чтобы тело находилось в равновесии, векторная сумма всех сил, действующих на него, должна быть равна нулю.
- При равновесии тела сумма проекций всех сил, действующих на тело, на любое направление должна быть равна нулю.
- Точку приложения силы можно переносить вдоль линии действия силы.
- Вторым условием равновесия тела является равенство нулю алгебраической суммы моментов приложенных к телу сил.
Условия равновесия тел
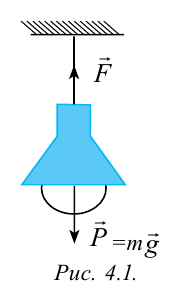
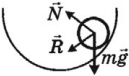
Рассмотрим силы, действующие на подвешенную к потолку лампу (рис. 4.1). Для начала вспомним изученное в 6-м классе понятие «центр масс» тела.
Центр масс – это воображаемая точка, в которой воплощена вся масса тела.
Исходя из этого будем считать, что силы, действующие на тело, приложены к центру масс. На подвешенную лампу действует направленная вниз сила тяжести  . При этом туго натягивается удерживающая ее нить. Возникающая в нити сила натяжения
. При этом туго натягивается удерживающая ее нить. Возникающая в нити сила натяжения  и сила тяжести
и сила тяжести  действуют вдоль одной прямой линии, которая проходит через центр массы и направлены противоположно. Эти силы равны по модулям. Если эти силы сложить по правилу сложения векторов, то результирующая сила становится равной нулю. Поэтому лампа остается в положении равновесия.
действуют вдоль одной прямой линии, которая проходит через центр массы и направлены противоположно. Эти силы равны по модулям. Если эти силы сложить по правилу сложения векторов, то результирующая сила становится равной нулю. Поэтому лампа остается в положении равновесия.
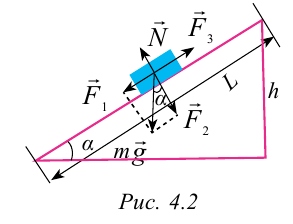
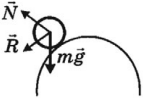
Рассмотрим случай, когда тело покоится в равновесии на наклонной плоскости (рис. 4.2). Рассмотрим действующие относительно центра масс силы в этом случае. На тело действует сила тяжести  .
.
Эту силу разделим на составляющие:  и
и  .
.
При этом сила  стремится сдвинуть тело вниз по наклонной плоскости, сила
стремится сдвинуть тело вниз по наклонной плоскости, сила  представляет силу давления на площадь наклонной плоскости. Эта сила приводит к образованию силы реакции
представляет силу давления на площадь наклонной плоскости. Эта сила приводит к образованию силы реакции  на тело со стороны наклонной плоскости. Также на тело действует сила трения
на тело со стороны наклонной плоскости. Также на тело действует сила трения  в противоположном относительно скольжения направлении.
в противоположном относительно скольжения направлении.
В этом случае векторная сумма всех действующих сил тоже будет равна нулю.
Исходя из вышесказанного можно сделать следующие выводы:
Для того чтобы тело или система тел, не имеющие вращения оси, остались в равновесии, векторная сумма всех действующих на них сил должна быть равна нулю.

Виды равновесия
Если некое тело находится в состоянии равновесия, это не означает, что оно постоянно будет находиться в таком состоянии (рис. 4.3). В реальных условиях тело подвергается неожиданным воздействиям извне, которые невозможно избежать. Главное, что нужно знать – останется ли тело после такого воздействия в равновесии или равновесие будет нарушено. Для этого необходимо учесть направление результирующей силы внешнего воздействия. В зависимости от направления результирующей силы различают три вида равновесия.
Устойчивое равновесие
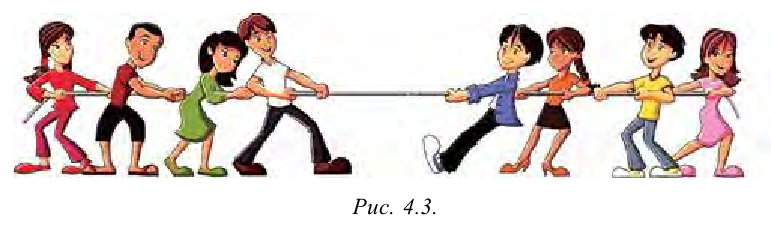
При выведении тела из положения равновесия возникают силы, возвращающие тело в прежнее положение, это называется устойчивым равновесием (рис. 4.4а). В данном случае, при небольшом смещении шарика, лежащего на дне сферического углубления, равнодействующая сила возвращает его в положение равновесия.
Неустойчивое равновесие
При выведении тела из положения равновесия возникают силы, удаляющие его от положения равновесия, это называется неустойчивым равновесием (рис. 4.4б). В данном случае шарик находится в верхней точке выпуклой сферической поверхности. При небольшом смещении из положения равновесия равнодействующая сила действующих на него сил удаляет его еще дальше от состояния равновесия.
Безразличное равновесие
Равновесие, при котором смещение тела в любом направлении не вызывает изменения действующих на него сил и равновесие тела сохраняется, называется безразличным равновесием (рисунок 4.4в). Если приложить силу к шарику, находящемуся на горизонтальной поверхности, то он переместится на другое место.
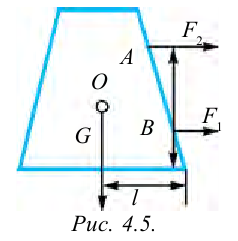
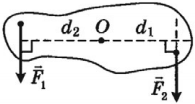
Если на тело, показанное на рисунке 4.5 действует сила  в точке
в точке  ниже центра тяжести (
ниже центра тяжести (  – сила трения), тело приходит в поступательное движение. Не меняя величину силы, приложим ее к точке
– сила трения), тело приходит в поступательное движение. Не меняя величину силы, приложим ее к точке  , при этом тело начинает наклоняться. Начинает уменьшаться расстояние
, при этом тело начинает наклоняться. Начинает уменьшаться расстояние  между крайними точками нижнего основания контура и вектором, направленным вниз из центра тяжести. Если продолжить прикладывать силу, вектор
между крайними точками нижнего основания контура и вектором, направленным вниз из центра тяжести. Если продолжить прикладывать силу, вектор  выйдет за пределы контура тела и оно опрокинется.
выйдет за пределы контура тела и оно опрокинется.
Таким образом, равновесие тела зависит от:
- 1) веса тела;
- 2) величины площади основания тела;
- 3) места приложения сил относительно центра тяжести.

Образец решения задачи
Тело массой 10 кг подвешено на двух нерастяжимых тросах. Они остаются в равновесном состоянии, образуя между собой угол равный 60 0 . Вычислите силу натяжения тросов.
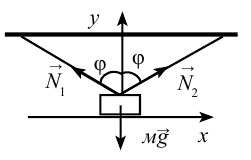
Согласно чертежу, действующие на груз силы  и
и  пересекаются в одной точке.
пересекаются в одной точке.
Следовательно, условие равновесия определяется двумя уравнениями:
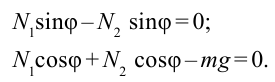
После внесения математических изменений получим: 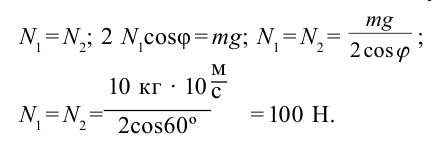
Ответ: 100 Н.
Определение условия равновесия тела
По I закону Ньютона, нахождение тела в состоянии равновесия означает, что оно находится в покое или движется прямолинейно и равномерно в инерциальной системе отсчета. Ознакомимся с условиями, при выполнении которых тело остается в состоянии равновесия.
Равновесие тела при поступательном движении
Поступательное движение тела можно рассматривать как движение одной его точки - движение центра массы. В этом случае для простоты можно принять, что вся масса тела сосредоточена в центре и равнодействующая сила, действующая на тело, прикладывается к этой точке. Из законов Ньютона знаем, что ускорение данной точки равно нулю тогда, когда равнодействующая сила (геометрическая сумма всех действующих сил), прикладываемая к этой точке, равна нулю. Это условие равновесия тела при поступательном движении:
Для нахождения тела в состоянии равновесия при его поступательном движении равнодействующая сила (геометрическая сумма всех действующих на тело сил), прикладываемая к телу, должна быть равна нулю:

Если геометрическая сумма сил равна нулю, то и сумма проекций этих сил на произвольную координатную ось равна нулю:
Равновесие тела с неподвижной осью вращения
На практике очень часто бывает, что при действии на тело с неподвижной осью вращения двух численно равных, но противоположно направленных параллельных сил, оно начинает вращаться вокруг этой оси. Например, блок, ворот и другие вращаются за счет таких параллельных сил. Значит, чтобы тело с неподвижной осью вращения находилось в состоянии равновесия, не достаточно, чтобы равнодействующая сила была равна нулю. Необходимо выполнение второго условия равновесия - правила моментов.
Тело с неподвижной осью вращения находится в равновесии, если алгебраическая сумма моментов действующих на него сил относительно оси вращения равна нулю:

При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Условия равновесия в механике
Равновесие в статике – это отсутствие движения. Чтобы объект находился в равновесии, нужно, чтобы выполнялись некоторые условия, рассмотрим их.
Условие равновесия материальной точки
Чтобы материальная точка находилась в равновесии, нужно, чтобы она не двигалась поступательно.
Примечания:
- Материальная точка может двигаться только лишь поступательно.
- Точка мала и не имеет внешних границ. Поэтому, она не может двигаться вращательно вокруг оси, проходящей через её центр. Если отодвинуть ось вращения от точки на некоторое расстояние, тогда точка сможет вокруг этой оси двигаться по окружности. Но вокруг собственной оси точка вращаться не может.
Материальная точка будет находиться в равновесии, когда выполняются два условия:
1. Векторная cумма сил, действующих на точку, должна равняться нулю.
Примечание: При выполнении этого условия, точка будет либо покоиться, либо двигаться вдоль прямой с одной и той же скоростью. Это следует из первого закона Ньютона.
2. Систему отсчета дополнительно выберем так, чтобы координаты точки в системе не менялись при выполнении условия 1.
Примечание: Такая система отсчета будет называться инерциальной, а точка будет покоиться относительно этой системы.
Условие равновесия тела
Чтобы тело находилось в равновесии, нужно, чтобы оно не двигалось поступательно и не вращалось.
Примечание: Тело, состоящее из нескольких точек, может вращаться вокруг оси, проходящей через центр этого тела. Поэтому, для тела условия равновесия нужно дополнить еще одним пунктом. Таким образом, получим три условия.
1. Алгебраическая cумма моментов сил, действующих на тело, должна равняться нулю.
[ large boxed < M_<1>+ M_ <2>+ M_ <3>+ ldots + M_
Примечания:
- При выполнении этого условия тело не будет вращаться.
- Моменты сил, вращающих тело по часовой стрелке, подставляем в это уравнение со знаком плюс. Моменты сил, вращающих против часовой стрелки – со знаком минус.
2. Векторная cумма сил, действующих на тело, должна равняться нулю.
Примечания:
- Векторы складывают, учитывая их направления, то есть, с помощью геометрии.
- Если условие выполняется, то тело сможет двигаться равномерно прямолинейно. Чтобы тело находилось в покое, необходимо еще одно условие:
3. Систему отсчета выберем так, чтобы координаты всех точек тела не менялись в ней при равенстве нулю векторной суммы сил.
Условия равновесия применяются для решения задач статики, связанных с моментами сил.
Виды равновесия
Различают такие виды равновесия:
- неустойчивое равновесие,
- устойчивое равновесие,
- безразличное равновесие.
Рассмотрим однородный шар (или, например, мяч), который покоится (рис. 1) на горке – а), на горизонтальном участке – б), и в ложбинке – в).

Неустойчивое равновесие
На вершине горы мяч находится в неустойчивом равновесии, потому, что стоит нам подтолкнуть мяч и, он скатится с горки (рис. 1а).
Равновесие неустойчивое:
при малом отклонении
потенциальная энергия тела уменьшается
силы и моменты сил
еще больше уводят тело от положения равновесия.
В состоянии неустойчивого равновесия потенциальная энергия тела максимальна!
Безразличное равновесие
На горизонтальном участке мяч будет покоиться в любом месте, в которое мы его поместим (рис. 1б). Подтолкнем мяч, он перекатится в другое положение и там будет оставаться в безразличном равновесии.
Если потенциальная энергия тела при его перемещении из одной точки пространства в другую точку остается постоянной, равновесие можно назвать безразличным.
Устойчивое равновесие
Мяч находится в ложбинке в устойчивом равновесии (рис. 1в). Легонько подтолкнув мяч, мы выведем его из равновесия, но через непродолжительное время мяч опять вернется в ложбинку.
Равновесие устойчивое:
при малом отклонении от равновесия
потенциальная энергия тела увеличивается
силы и моменты сил
возвращают тело в положение равновесия.
Примечание: Потенциальная энергия тела будет минимально возможной, когда тело находится в устойчивом равновесии!
Равновесие тела, могущего вращаться вокруг горизонтальной оси
Рассмотрим однородный шар, изготовленный, к примеру, из пенопласта. Проткнем его спицей, после закрепим ее горизонтально, подобно перекладине на двух опорах (рис. 2).
Спица будет являться неподвижной осью вращения.

Рассмотрим три случая для тела, могущего вращаться вокруг оси. Ось вращения
- проходит через центр масс шара — равновесие безразличное (рис. 2а),
- находится выше центра масс – равновесие устойчивое (рис. 2б),
- находится ниже центра масс – равновесие неустойчивое (рис. 2в).
Примечание для случаев устойчивого и неустойчивого равновесия:
центр масс расположен на вертикальной линии (пунктир на рисунках 2б и 2в), проходящей через ось вращения.
Вокруг неподвижной оси может вращаться любое тело, в том числе, продолговатое, например, рычаг. В задачах статики для него применяют условия равновесия рычага.
Тело опирается на площадь поверхности
Условие равновесия для такого тела:
Проекция центра масс должна лежать внутри площади основания.
Допустим, зодчий захотел построить наклонную башню. Заменим для упрощения башню однородным наклонным цилиндром (рис. 3).

Упадет ли наклонная башня?
На рисунке 3а проекция центра масс попадает внутрь площади основания. Поэтому, башня, обладающая таким наклоном, не упадет.
Если центр масс выйдет за пределы площади, на которую тело опирается, то башня опрокинется (рис 3б).
Примечание: Башня своим весом давит на площадь основания – круг. Сила давления распределяется по всему основанию тела.
Условия равновесия тел — виды, формулы и примеры
Раздел механики, изучающий условия равновесия тел, называют статикой. Методы науки используются в самых различных областях деятельности человека. Архитекторы и инженеры рассчитывают силы, действующие на всевозможные конструкции, знание о поведении мышц позволяет лечить травмы. Поэтому важным в физике является понимание условий, обеспечивающих телу состояние покоя, умение расчёта действующих сил. При этом единого способа решения задач не существует.

Общие сведения

Статика — это наука, изучающая силы, при которых положение тела не изменяется в пространстве. Такая ситуация называется равновесием. Особенность покоящихся тел в том, что в таком состоянии они не обладают ускорением и скоростью, а результирующая сила и момент равны нулю. Поэтому и кажется, что на тело не оказывается никакого воздействия, но на самом деле это не так.
В общем смысле под равновесием понимают состояние, которое может сохраняться сколько угодно долго, если нет внешних воздействий. Это утверждение справедливо для любого вида состояния покоя. Например, механического, теплового, экономического, политического и тому подобного.
В механике состояние движения физической точки описывает скорость. Если она не изменяется, то параметр всегда постоянный. Значит, под механическим равновесием можно понимать состояние прямолинейного равномерного движения. Кроме этого, при определённых условиях к нему можно отнести и обращение. Например, вращающееся колесо, которое крутится на оси без учёта сил трения.
При воздействии различных сил на материальную точку объект может вести себя трояко. В соответствии с этим различают три вида реакции физического тела на попытку вывести его из этого положения:

Следует отметить, что для того чтобы узнать, какой вид равновесия присущ ситуации, необходимо вывести объект из положения покоя. При этом первостепенной задачей статики является изучение условий, которые приводят к одному из трёх состояний тела, и их математическое описание.
Центр тяжести и условия равновесия

Простейшим случаем, при котором материальная точка находится в равновесии, будет тот, когда нет вращения, а размерами тела можно пренебречь. В этом случае ускорение равняется нулю: a = 0. Выяснить условия равновесия значит определить действующие силы. Согласно второму закону Ньютона, их равнодействующую можно найти из произведения массы на ускорение: F = m * a. Отсюда следует, что в состоянии покоя F = 0.
Реальное тело имеет определённые размеры. Чтобы определить для такого случая условие, необходимо рассмотреть самый простой вид движения — поступательное. Им называют перемещение, при котором все точки в теле двигаются одинаково, то есть с одной и той же скоростью. А это значит, что ускорения для всех его частиц будет постоянным и равняться нулю.
Пусть имеется горизонтальная поверхность, на которой находится, например, тележка. Через неё можно провести условную прямую под любым наклоном к горизонту. Места пересечения контуров тела с построенной линией будут точками A и B. К любой из них можно приложить силу F. Тележка начнёт двигаться. Эту силу можно перенести вдоль линии к другой точке, не изменяя направления, то есть сменить место приложения. В результате никаких изменений не произойдёт.
Но предыдущих двух условий мало, чтобы можно было сформулировать достаточные условия. Например, пусть есть карандаш, лежащий на столе.
Сумма действующих на него сил равняется нулю, но при этом он может вращаться. Значит, важным условием должно быть отсутствие углового ускорения. Другими словами, состояние, при котором момент внешних сил равен нулю.
Таким образом, если тело находится в равновесии, для него должны выполняться три условия:
- равнодействующая всех сил, приложенных к объекту, равняется нулю: F = F1 + F2 +…+ Fn = 0;
- действие силы не изменяется при переносе точки её приложения вдоль линии действия;
- объект будет иметь неподвижную ось вращения лишь тогда, когда алгебраическая сумма моментов действующих на него сил относительно оси равна нулю: M = M1 + M1 +…+ Mn = 0.

Перечисленные условия являются необходимыми для нахождения тела в состоянии равновесия. Составив систему из уравнений, можно решать задачи с тремя неизвестными, что часто оказывается более чем достаточно, особенно для школьной программы.
Закреплённая ось вращения
Объект не будет вращаться, если равнодействующая приложенных к нему сил будет равняться нулю. Пусть имеется тело эллипсоидной формы. Чтобы оно не перемещалось поступательно, необходимо добиться одинакового движения точек.
В предмете можно сделать отверстие, которое будет обозначать ось вращения. Тогда центры перемещения точек находятся на этой линии.

К произвольно взятому месту A можно приложить силу F. Тело начнёт поворачиваться до тех пор, пока не наступит ситуация, при которой линия действия F начнёт проходить через ось. Тогда вращение прекратится. То есть произойдёт компенсирование реакцией оси. Кроме того, эти два действия не только лежат на одной линии, но и равны по модулю.
Из второго условия равновесия следует, что силу можно перемещать вдоль оси. Если это сделать, то к противоположной точке A окажется приложено две силы. Они будут равны по величине, но противоположны по направлению. Эта пара действует на закреплённую ось, поэтому предмет, необязательно эллипсоидной формы, вращаться не будет.
Таким образом, тело любого размера и массы с закреплённой осью будет находиться в равновесии, если линия действия приложенной к ней силы проходит через ось. Это простая ситуация. Но может случиться так, что на тело будет оказываться воздействия одновременно с нескольких сторон. Причём они будут приложены к разным местам тела. В этом случае, как и в первом, всё равно можно будет подобрать такую силу, которая будет действовать, как все существующие.
Значит, обобщённое определение можно сформулировать так: тело с закреплённой осью вращения будет находиться в равновесии, если линия действия равнодействующей приложенных воздействий проходит через ось.
Но на самом деле этим правилом пользоваться неудобно, так как часто найти общее действие бывает довольно сложно. Поэтому используют плечо силы. Это кратчайшее расстояние до оси вращения. Физически величина равна произведению модуля действия на её плечо и называется моментом. Описывают её формулой: M = F * d, где первый член — модуль, а второй — плечо относительно оси вращения.
За единицу измерения момента принимают ньютон, умноженный на метр (Н * м). Причём эта величина может иметь как положительное, так и отрицательное значение. Выбор знака зависит от направления. Строго требования нет, но в математике вращение по часовой стрелке считают плюсовым, а против — минусовым.
Решение задач
Важно не только знать теоретический материал, но и уметь применять его на практике. Единого метода решения задач в статике не существует. В учебных классах по физике можно встретить плакаты, на которых изображён алгоритм вычислений, когда тело находится в инерциальной системе отсчёта (ИСО). Последовательность действий выглядит так:

Несомненно, самым трудным будет первый шаг. Вот один из примеров среднего уровня сложности. Однородная балка массой 1200 кг представляет собой весы. В конструкции убрали среднюю опору, но поставили две крайних. На балку положили механизм весом 15 тонн. Определить силу, действующую на каждую из вертикальных опор. Учесть, что длина между колонами составляет 20 м, а расстояние от центра до груза равняется пяти метрам.
Вначале следует рассмотреть силы, действующие на концы балки. Они будут равны по величине действиям, с которыми концы главного стержня давят на опоры. Пусть это будет F1 и F2. Сила тяжести балки приложена к центру масс, то есть приходится на середину. Так как условие равновесия для моментов можно записать относительно любой точки, то удобнее взять её в месте приложения F1. Поскольку в этом случае она будет равняться нулю из-за значения плеча, то останется только одна неизвестная — F2.
Тогда условие ΣF = 0 будет выглядеть так: -(10 м) * (1200 кг) * (g) — (15 м) * (15000 кг) * (g) + (20 м) * F2 = 0. Отсюда F2 = (12000 кг) * (g) = 118000 H. Теперь силу F1 можно вычислить из условия равновесия: ΣFy = F1 — (1200 кг) * (g) — (15000 кг) * (g) + F2 = 0. Подставив в полученное выражение F2 = (12000 кг) * (g), верным будет записать: F1 = (4200 кг) * (g) = 41200 Н. Задача решена.
Таким образом, главное — правильно выбрать ось вращения, тем самым сделать расчёт более простым. Следует отметить, что в инженерии некоторые силы определяют с помощью специальных датчиков напряжения. Например, пьезоэлектрические датчики и тензодатчики. Их крепят как на саму конструкцию, так и на её модель.
Статика

Статика – это раздел механики, изучающий условия равновесия тел.
Виды равновесия тел
- Устойчивое равновесие – это равновесие, при котором тело, выведенное из положения равновесия и предоставленное самому себе, возвращается в прежнее положение.
- Неустойчивое равновесие – это равновесие, при котором тело, выведенное из положения равновесия и предоставленное самому себе, будет еще больше отклоняться от положения равновесия.
- Безразличное равновесие – это равновесие, при котором тело, выведенное из положения равновесия и предоставленное самому себе, не меняет своего положения.

Момент силы
Момент силы – это физическая величина, равная произведению модуля силы на ее плечо.
Обозначение – ( M ) , единицы измерения – Н·м.

где ( d ) – плечо силы ( F ) .

Плечо силы – это кратчайшее расстояние (перпендикуляр) от оси вращения до прямой, вдоль которой действует сила.
Обозначение – ( d ) или ( l ) , единицы измерения – м.
Знак момента силы
Если сила, приложенная к телу, вращает его по часовой стрелке, то момент силы положителен ( ( M ) > 0):

Если сила, приложенная к телу, вращает его против часовой стрелки, то момент силы отрицателен ( ( M ) Условия равновесия тел
Тело находится в равновесии, если
- векторная сумма всех сил, действующих на тело, равна нулю;
- алгебраическая сумма всех моментов сил, вращающих тело по часовой стрелке, равна алгебраической сумме моментов сил, вращающих его против часовой стрелки:

Центр тяжести – это точка внутри тела или вне его, относительно которой сумма моментов сил тяжести, действующих на отдельные его части, равна нулю.
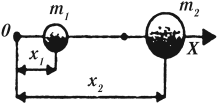
Центр масс – геометрическая точка, положение которой характеризует распределение масс в теле:
Важно!
Для твердого тела центр тяжести совпадает с центром масс.
Простые механизмы
Простые механизмы – это приспособления, служащие для преобразования силы.
Рычаг – это простейшее механическое устройство, представляющее собой твердое тело (перекладину), вращающееся вокруг точки опоры.
Рычаг дает выигрыш в силе:

Блок — простое механическое устройство, представляющее собой колесо с желобом по окружности, вращающееся вокруг своей оси. Желоб предназначен для каната, цепи, ремня и т. п.
Блок бывает подвижный и неподвижный.
Неподвижный блок – это блок, ось которого закреплена.
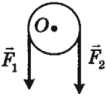
Неподвижный блок не дает выигрыша в силе, он используется для изменения направления действия силы.
Подвижный блок – это блок, имеющий свободную ось.

Подвижный блок дает выигрыш в силе в 2 раза:
«Золотое правило» механики
При использовании простых механизмов во сколько раз выигрываем в силе, во столько же раз проигрываем в расстоянии, т. е. простые механизмы выигрыша в работе не дают.
Давление жидкости
Давление жидкости – это величина, равная произведению плотности жидкости на модуль ускорения свободного падения и на высоту столба жидкости.

где ( rho ) – плотность жидкости,
( h ) – высота столба жидкости.
Сила давления жидкости – это сила, равная произведению давления жидкости на площадь поверхности:

- на дно сосуда:

- на боковую стенку:

Сообщающиеся сосуды
Сообщающиеся сосуды – это сосуды, соединенные между собой ниже уровня жидкости.
Закон сообщающихся сосудов:
в неподвижных и открытых сообщающихся сосудах любой формы давление жидкости на любом горизонтальном уровне одинаково.
Следствия из закона сообщающихся сосудов:
- в неподвижных и открытых сообщающихся сосудах высоты столбов жидкостей, отсчитываемых от уровня, ниже которого жидкость однородна (уровня mn), обратно пропорциональны плотностям этих жидкостей:

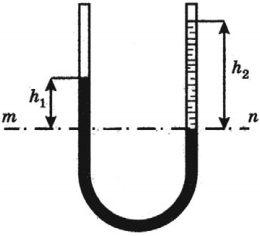
- в неподвижных и открытых сообщающихся сосудах однородная жидкость всегда устанавливается на одинаковом уровне независимо от формы сосудов.
Важно!
Давление, которое создает жидкость, находящаяся в равновесии при действии на нее силы тяжести, называют гидростатическим. Гидростатическое давление определяется формулой ( p=rho gh ) .
Давление внутри жидкости на любой глубине складывается из атмосферного давления, или внешнего давления на жидкость, и гидростатического давления:
где ( p_0 ) – атмосферное давление.
Закон Паскаля
Закон Паскаля
Давление, производимое на жидкость или газ, передается по всем направлениям одинаково.
Следствие из закона Паскаля — гидростатический парадокс: давление, производимое на дно сосуда, зависит только от высоты столба жидкости:

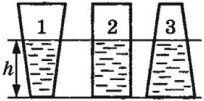
Сила давления жидкости на дно разная, т.к. она зависит от площади дна:

Гидравлический пресс – два сообщающихся сосуда, заполненные жидкостью и закрытые поршнями различной площади.
Гидравлический пресс дает выигрыш в силе, но проигрыш в длине пути поршня:

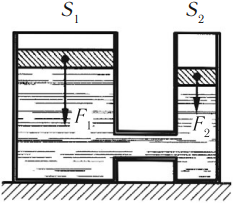
Силы, действующие на поршни гидравлического пресса, пропорциональны площадям этих поршней:

Атмосферное давление – это давление, которое оказывает атмосфера на все находящиеся в ней предметы.
Атмосферное давление уменьшается с увеличением высоты подъема над Землей.
Нормальное атмосферное давление: ( p_0 ) = 10 5 Па.
Приборы для измерения давления:
- барометры – приборы, предназначенные для измерения атмосферного давления (ртутный барометр, барометр-анероид);
- манометры – приборы, предназначенные для измерения давлений жидкостей и газов.
Закон Архимеда
Архимедова сила – это выталкивающая сила, действующая на тело, погруженное в жидкость или газ.
Причина возникновения выталкивающей силы – разница давлений жидкости или газа на верхнюю и нижнюю грани.
Архимедова сила всегда направлена перпендикулярно поверхности жидкости.
Архимедова сила равна разности веса тела в воздухе и веса тела в жидкости или газе:
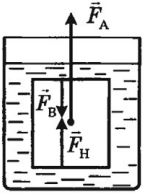
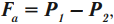
где ( P_1 ) – вес тела в воздухе,
( P_2 ) – вес тела в жидкости или газе.
Закон Архимеда
На тело, погруженное в жидкость или газ, действует выталкивающая сила, равная весу жидкости или газа, вытесненных телом:

Если тело полностью погружено в жидкость, то

где ( V_m ) – объем тела, погруженного в жидкость.
Если тело не полностью погружено в жидкость, то

где ( V_ <чm>) – объем части тела, погруженной в жидкость.
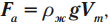
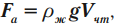
Условия плавания тел
На любое тело, погруженное в жидкость или газ, действуют две силы, направленные в противоположные стороны, – это сила тяжести и архимедова сила. Направление движения тела зависит от того, какая из этих сил больше по модулю.
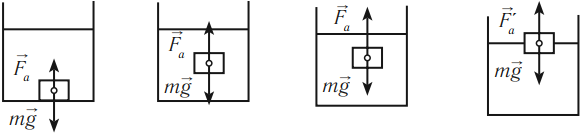
Условия плавания тел

- Тело плавает внутри жидкости:

- Тело всплывает:

- Тело плавает на поверхности жидкости:

где ( V_1 ) – объем части тела, погруженной в жидкость.
Важно!
Выталкивающая сила действует на тела в жидкостях и газах, потому что сжаты силой притяжения к Земле. В состоянии невесомости эта сила не действует.